

高速道路における自動運転トラックの本線合流を道路インフラから支援
~国内初の実道での自動運転トラックの実証実験~ (国土技術政策総合研究所 松原 朋弘)
(2025年10月15日)
近年、自動車メーカによる一般車両の自動運転、自治体や公共交通セクター等によるバスや次世代モビリティ(移動サービス)の自動運転のプロジェクトが次々と立ち上がり、世間を賑わせています。そんな中、トラック(物流サービス)の世界でも自動運転のプロジェクトが進行しています。
近年、我が国では、EC市場の拡大等による物流件数増加や、トラックドライバー不足の深刻化等による物流危機が叫ばれています。そこで、自動運転トラックを導入し、輸送の省力化・無人化を行うことで、この危機に対応することが議論されています。しかし、最新の技術でも、自動運転トラック単独ではドライバーの運転を代替可能なレベルに達していないのが現状です。何故ならトラックは、車両性能上、加速や車線変更に長い走行距離が必要であり、また、車両寸法等の制約上、車載センサによる周辺交通の検知に限界があるからです。特に難しいことの一つとして、高速道路上でのスムーズな本線合流が挙げられます。
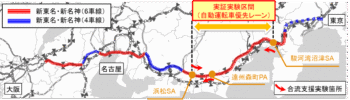
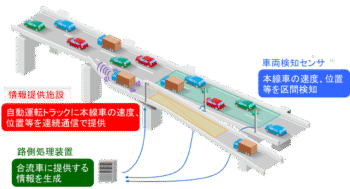
自動運転物流サービスの早期実現は、デジタルライフライン全国総合整備計画等の国家計画にも位置付けられており、2024年には新東名高速道路(駿河湾沼津SA~浜松SA)に自動運転車優先レーンが設定(深夜時間帯限定)され、自動運転トラックの実道走行が開始されました(図-1)。国土技術政策総合研究所(以下、国総研)では、自動運転トラックの安全・円滑な本線合流を支援するため、本線の交通状況等を事前に情報提供する実験(合流支援情報提供)を実施しています(図-2)。
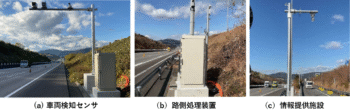
本実験で使用する自動運転トラックは、実験車両協力者 (トラックメーカ等)が準備し(図-3)、関係者と協議したうえで合流支援情報提供のための実験設備を整備し、合流支援情報提供の有効性を検証することとしました(表-1)。

表-1 合流支援情報提供の有効性の評価基準・指標
|
評価基準 |
評価指標 |
説明 |
|
快適性 |
速度 |
自動運転トラックの速度 |
|
加速度 |
自動運転トラックの加速度 |
|
|
角速度 |
自動運転トラックが旋回する際の角度変化量 |
|
|
安全性 |
TTC |
自動運転トラックと本線車が速度と走行方向を維持している時、後方車が前方車に追いつくまでの時間 |
|
PICUD |
自動運転トラックが急減速した際、後方車が遅れて急減速して停車した時の相対位置 |
|
|
円滑性 |
回避行動 |
自動運転トラックの本線合流前後において、本線車が回避するために行った車線変更 |
|
減速度 |
自動運転トラックの本線合流前後における本線車の減速度 |
|
|
本線交通の乱れ |
自動運転トラックの本線合流前後の本線に発生する乱れ |
実験設備としては、合流支援情報提供に必要となる車両検知センサや情報提供施設等を中日本高速道路株式会社と連携して設置しました(図-4)。また、実験の検証に必要なデータを取得するため、自動運転トラックに高精度な測位情報を取得できる機器(RTK-GNSS受信機)を取り付けたほか、実験箇所周辺に俯瞰カメラを設置し、自動運転トラックを含む合流部周辺の交通状況を観測できるようにしました(図-5)。

今後は、2025年度中に実施した実験の結果を踏まえて、自動運転トラックへのより適切な合流支援情報提供に向けた技術仕様を作成する予定です。なお、2025年度以降も他路線(東北自動車道等)で国総研による同様の実証実験を予定しており、これら知見の蓄積を通じて、自動運転トラック向け合流支援情報提供の技術仕様を充実させていく予定です。
【参考】
1) 記者発表(国土交通省道路局、国土技術政策総合研究所)
新東名高速道路における自動運転トラックの実証実験を開始
~自動運転車優先レーンを活用し自動運転トラックの走行をインフラから支援~(2025年2月7日)
2)国総研レポート 2025
道路インフラからの支援による自動運転トラックの実現に向けた取組(2025年4月1日)
2) 第3回 自動運転インフラ検討会 資料1
自動運転の実現に向けたインフラ連携の取組について(2025年7月9日)

松原 朋弘(まつばら ともひろ)
国土交通省 国土技術政策総合研究所 道路交通研究部 高度道路交通システム(ITS)研究室 主任研究官 兼 PIARC(世界道路協会)Technical Advisor (技術顧問)
2014年国土交通省入省。道路局、在フィリピン日本国大使館経済班、近畿地方整備局道路部などで、主に道路計画、国際協力に関する業務を経て、現在は国土技術政策総合研究所(つくば)、及び世界道路協会(フランス・パリ所在の国際機関)にて、路車協調型自動運転に関する調査研究等に従事。