

「はやぶさ2」便り2 ~ ホップ、ステップ、ジャンプ ~
(2018年11月01日)
ミネルバ-Ⅱ 着陸時CG ミネルバからの表面画像(広角カメラによる)
1998年から北海道砂川市(無重力落下試験)、名古屋空港(現県営名古屋空港)での無重力フライト、岐阜県土岐市(無重力落下試験)、ドイツの実験施設、さまざまな場所で小惑星イトカワやリュウグウのような地球の10万分の1ほどの極低重力下での挙動を「無重力実験装置」で確認してきた初代のローバー「ミネルバ」。
「はやぶさ」に乗せられたその機体は、2005年11月12日イトカワへ投下された。しかし「はやぶさ」が上昇中に分離されたため着陸はできなかった。だが15時間にわたってデータは送り続けられ、初代ミネルバの機能は正常だったことがわかっている。
それから13年、
無重力に近い小惑星の上で、小型のローバーをホップさせる、
そんな世界で初めての試みが2018年9月21日ようやく実現した。
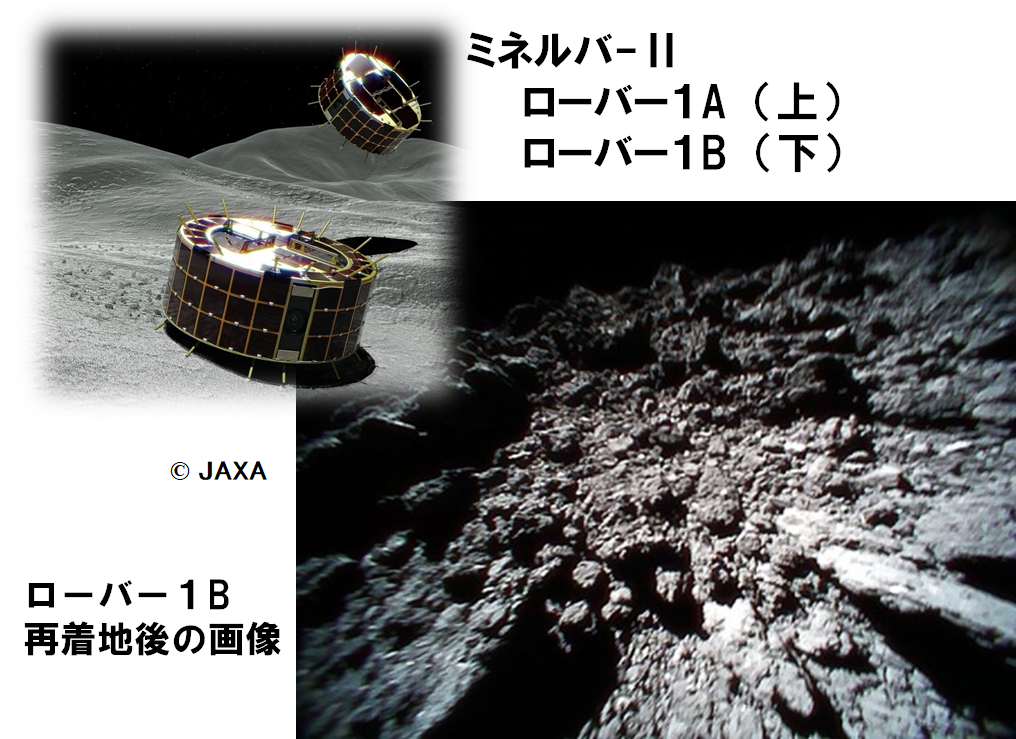
「はやぶさ2」には、径18cm、高さ7cmの十六角柱、重さ約1.1kgで広角カメラと温度計を備えたミネルバⅡ-1 2機と、大学共同で製作された少し大きなミネルバⅡ-2(2019年に分離予定)、ドイツ/フランス共同開発のマスコット、計4機のローバーが搭載された。
9月21日13:05(以下日本時間)、高度55mで「はやぶさ2」から分離された2機のミネルバⅡ-1(ローバー1A、1B)が、ゆっくりした速度でリュウグウ表面に降下していった。約15分後表面に到着、1度、2度と大きくバウンドしながら表面に静止した。ローバーの周りには、一面に大小の岩石が隙間なく敷き詰められたような光景が広がっていた。(画像参照)「はやぶさ」が降下した「ミューゼスの海」のような平坦な場所はどこにも見つからなかった。ミネルバはその後も表面で何度もホッピングしながら場所を変えて活動を続けている。
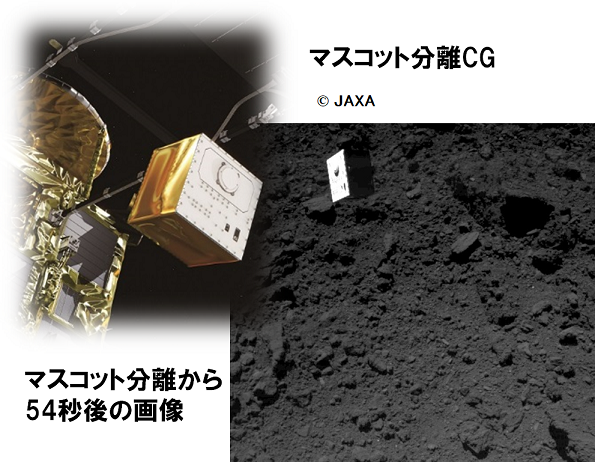
10月3日、「はやぶさ2」は“旅慣れた道のり”を1日かけて降下していった。ドイツ、フランスが共同開発したMASCOT(マスコット)ローバーの分離投下が行われた。
マスコットは縦横30cm、高さ20cm、重さ10kg、箱形のローバーで、広角カメラ、分光顕微鏡、熱放射計、磁力計などを搭載している。電力は、太陽電池は持っていないので内部のバッテリーのみで、寿命は約16時間と予定された。
10:57:20、高度51mで分離、ゆっくり“MA-6”着陸候補地域へ降下開始。
分離の時「はやぶさ2」の津田プロマネは“Good luck,MASCOT”と声を上げたという。(はやぶさ2ツイッターによる)日本の探査機が初めて海外のローバーを分離したのだ。
分離から54秒後、「はやぶさ2」の横腹に備え付けられた広角カメラ(ONC-W2)によって、降下していくマスコットの姿が捉えられる。(画像参照)
10:59:40、今度は真下をむく広角カメラが、降下していくマスコットとその影を撮影。
高度25mまで降下した時点でマスコットのカメラが自分の影を自撮り成功。
11:03、分離から約6分後マスコットが表面に接地、その後何回かバウンドして止まった。観測には向かない姿勢だったので、姿勢変更メカニズムを起動、ごろんと姿勢を大きく変えた。その後プログラムに従ってすぐ観測が始まった。
リュウグウで3晩を過ごした4日04:04、当初の予定を越えてマスコットは活動して、すべてのデータを「はやぶさ2」に送信し終えて眠りについた。
ミネルバもマスコットもデータ解析は始まったばかり、その成果が出てきたときに、初めて小惑星をその場(in-situ)観測したデータとして高い価値を持つものとなろう。
そして「はやぶさ2」のメインイベントが始まろうとしている・・・・・しかしそれまでの路はまだ遠かった。
(次回へ続く)
小笠原 雅弘(おがさわら まさひろ)
NEC、チーム「はやぶさ」メンバー。軌道系、航法誘導系担当、特にイトカワへの着陸に使われたターゲットマーカやフラッシュランプを手がけた。1985年にはじめてハレー彗星へ旅した「さきがけ」をはじめ、スイングバイ技術を修得した「ひてん」、月のハイビジョン映像を地球に送り届けた「かぐや」など日本の太陽系探査衛星にずっと携わってきたエンジニア。
現在、NEC航空宇宙システム勤務。